Holajuntos,
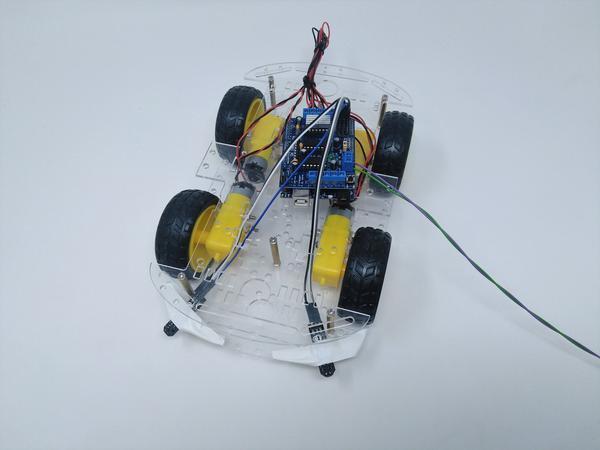
hoy quiero compartir con Ustedes un Proyecto en el que nosotros, a través de una Solicitud de un cliente advertido. Vamos a construir un sencillo nuevo rumbo-Robot.
El Proyecto está diseñado de tal forma que el Código tanto con dos como con vierrädigen Robots funcione y constituye un Compromiso. Para un funcionamiento Continuo si el Sketch y la Interconexión necesariamente modificarse, ya que la Carga de los cuatro Motores en un IC muy alto.
Mediante el uso de dos Sensores diferencia de que el Vehículo entre el blanco y negro de la superficie, y corrige el Sentido de la marcha en consecuencia, utilizamos nuestros nuevos módulos de sensores, sin Poti.
El Principio es bastante simple y el correspondiente Código, por consiguiente, compacto, por lo que no tenemos en este Proyecto que ha caído.
Para este Proyecto, Te hice un Set creado, esto se Puede encontrar aquí.
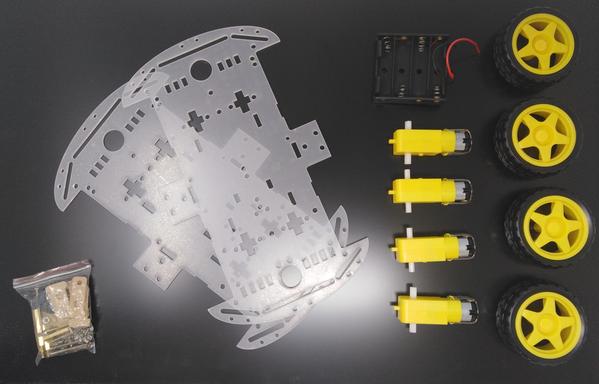
lo que necesitamos es:
- Chasis con motores de desplazamiento y Neumáticos
- 2 Linienfolgemodule
- microregulador de corriente, compatible con Arduino R3
- Motor Shield L2930
- de Alimentación con 4 Pilas AA de 4 los motores de tracción algo insuficientemente atendidas)
Vamos a empezar con el montaje de Chasis:
en primer lugar, Se realizarán las Láminas de protección deducir, nosotros no lo hicimos, ya que las Placas transparentes ni peores fotos.
Para facilitar el Montaje, deberían ser los Motores, antes de la Instalación de cableado.

Soldadura para ello, Cable de Latón Bandera de los Motores. Donde el rojo y el negro se fijan juega por el momento, no importa. Corto para la Comprensión: el Sentido de giro de los Motores puede ser modificado mediante la Polaridad se invierte.

Luego, los Soportes de los Motores, el Chasis vara.

Tras la bedrahteten Motores con el largo, Tornillos de fijación y con las Tuercas de copia de seguridad:


a Continuación, los pernos prisioneros de cobre amarillo a través de la Placa de enchufe y con los tornillos de Tuercas, donde esta colocación es en función de Su Diseño y posterior Uso. Las Posiciones son variables.
![]()
Como siguiente Paso, ya en la parte Superior de montar y atornillar:

Para profundizar aquí está una Imagen de la Página:

Donde el Controlador de colocar y en qué Dirección la Linienfolger sale, también Se puede especificar. Para el Montaje de la Mecánica completa. Como siguiente Paso, el Motor Shield las bases de conexiones soldar, como aquí se ve en la Imagen:

se necesitan para, más tarde, los Sensores de conectar.
El colocar el Disipador de calor, no es necesario pero si muy recomendable. Es posible que la Carga en varias ICs distribuir y todos los cuatro Motores por separado en Shield conectar (también se puede hacer en el Sketch ser cambiado).
Próximo a la Conexión de los Motores: en primer lugar vamos a poner los dos Motores de la izquierda y la derecha, respectivamente, junto. Aquí tiene algo que probar, hasta que los Motores y los Motores, de otro Lado, juntos en la misma Dirección. Como ya hemos dicho, se puede muy fácilmente, con el intercambio de los Polos de cambiar.
Aquí, los Motores de conexión:

Conectores en la Placa de M3 y M4 marcadas, respectivamente, de la izquierda Motores en una Terminal, y la derecha en la segunda Tirada.
Ahora, incluso la fuente de Alimentación: El Shield también proporciona el Microcontrolador con la Electricidad.

Las dos Flechas de la parte inferior derecha de la pantalla para marcar las Conexiones para A4 y A5, donde tenemos nuestras Linienfolger-conectar Sensores.
Ya tenemos nuestro Robo-Car más a menudo reconstruir tenemos los Sensores sólo temporalmente con Cinta adhesiva. El Sensor izquierdo en el Pin A4, el botón Sensor en A5, como se muestra en la Imagen:

es importante, los Sensores de frente de montar, sino ligeramente inclinada en los Flancos, como arriba se ve en la Imagen.
Antes de comenzar con el Código dedicar, qué nos Aarav han prestado, todavía necesitamos una Library, que para el Motor Shield. Tenemos la Adafruit Library, que usa que aquí encontrará.
Aquí el Código:
//////////////////////////////////////////////////////// // LinoBot v1.0 // // By Aarav Garg // //////////////////////////////////////////////////////// //I have added the possibilities of testing //The values of analogRead could be changed for trouble shooting //including the librerías #include <AFMotor.h> //definición de pins and variables #define lefts A4 #define derechos A5 //defining motor AF_DCMotor motor1(4, MOTOR12_8KHZ); AF_DCMotor motor2(3, MOTOR12_8KHZ); /* AF_DCMotor motor3(1, MOTOR12_8KHZ); AF_DCMotor motor4(2, MOTOR12_8KHZ); */ void setup() { //setting the speed of motor motor1.setSpeed(100); motor2.setSpeed(100); //declarar tipos de pin pinMode(izquierdas,ENTRADA); pinMode(derechos,de ENTRADA); //comienza el serial la comunicación Serial.comenzar(9600); } void loop(){ //impresión de los valores de los sensores para el monitor de serie de Serie.println(analogRead(izquierdas)); Serie.println(analogRead(derechos)); //línea detectado por tanto si(analogRead(izquierdas)<=400 && analogRead(derechos)<=400){ //stop motor1.ejecutar(la LIBERACIÓN); motor2.ejecutar(LIBERACIÓN); } //línea detectado por el sensor izquierdo cosa si(analogRead(izquierdas)<=400 && !analogRead(derechos)<=400){ //gire a la izquierda motor1.correr(hacia ATRÁS); motor2.ejecutar(ADELANTE); /* motor1.de ejecución(de la LIBERACIÓN); motor2.ejecutar(hacia ADELANTE); */ } //línea detectado por el sensor adecuado cosa si(!analogRead(izquierdas)<=400 && analogRead(derechos)<=400){ //gire a la derecha motor1.ejecutar(ADELANTE); motor2.correr(hacia ATRÁS); /* motor1.ejecutar(hacia ADELANTE); motor2.de ejecución(de la LIBERACIÓN); */ } //línea detectado por ninguna otra cosa si(!analogRead(izquierdas)<=400 && !analogRead(derechos)<=400){ //stop motor1.ejecutar(ADELANTE); motor2.ejecutar(ADELANTE); /* motor1.ejecutar(hacia ATRÁS); motor2.ejecutar(hacia ATRÁS); */ } }
Übrigens atacados morir Analógico-Pins genutzt weil diese im Gegensatz zu den Digital-Pins auf dem Escudo de leicht zugänglich sind.
Das Projekt ist así ausgelegt, dass der Código sowohl mit zwei-, als auch mit vierrädigen Robotern lauffähig ist und stellt einen Kompromiss dar. Für einen Dauerbetrieb sollte der Croquis und die Verschaltung unbedingt geändert werden, da morir Última der vier Motoren auf einen IC sehr hoch ist.
Das Einstellen der Laufrichtung für die Fahrmotoren kann u.U. etwas knifflig werden, hier ist etwas Geduld gefragt.
Viel Spaß beim nachbauen & bis zum su mal :)










7 comentarios
Andreas Wolter
@Michael Beylich: das ist eine sehr interessante Idee.
Die Funktionsweise der Linienfolger ist so aufgebaut, dass sich die Spannung an der Fotodiode verändert, wenn sich die Intensität des reflektierten Lichts verändern. Daher ist auch ein hoher Kontrast notwendig (hier schwarz und weiß, also der höchstmögliche Kontrast).
Wenn ich Ihre Idee richtig verstanden habe, möchten Sie einen Leitstrahl installieren.
Dafür sollte man eher andere Sensoren verwenden, da die Linienfolger nur geringe Abstände zulassen.
Ich hatte schonmal ein ähnliches Projekt mit einem robocar, Fotosensor und einer Taschenlampe.
Mit einem IR-Laser könnte man das theoretisch genauso umsetzen. Um die Richtungsänderung des Lasers zu detektieren, bräuchten man mehrere voneinander getrennte Fotodioden, die auf den IR-Laser reagieren können. Ich würde zuerst probieren, vier in einer Matrix anzuordnen und mit Sichtschutz voneinander zu trennen. Ähnlich wie beim Solartracker von Miguel Torres Gordo: https://www.az-delivery.de/blogs/azdelivery-blog-fur-arduino-und-raspberry-pi/solar-tracker-mit-schrittmotoren-und-oled-display
Ansonsten können Sie uns auch gern kontaktieren über die blogs@ Adresse. Vielleicht finden wir eine praktikable Lösung.
Grüße,
Andreas Wolter
Michael Beylich
Hallo,
Ich komme aus dem Schiffsmodellbau und frage mich, ob es möglich ist, diesen Aufbau zu adaptieren. Bei Rettungskreuzern gibt es sog. Tochterbote, die nach dem Aussetzen auch mal wieder aufgenommen werden müssen. Das ist bei ruhigem Wasser schwierig, bei bewegtem nahezu unmöglich. Man „trifft“ die Tochterboot-Wanne nicht.
Die Idee wäre, im Mutterschiff z.B. eine IR-Diode zu platzieren und dann dem „Strahl“ automatisch zu folgen. Gesteuert werden müsste nur der Motor für die Schraube und das Lenkservo.
Wäre das realisierbar? Und auch nicht zu gross und schwer?
Danke im voraus.
Andreas Wolter
@Wulv: A sensor detects differences in contrast. A black line on a white background has the highest contrast. If a change is detected, the direction will be corrected. Since a black line has a transition to the white background on both sides, two sensors are used. It would also work with one sensor. Then the code looks different.
Best Regards,
Andreas Wolter
AZ-Delivery Blog
>Ich verstehe nicht, wie man mit dieser Position der Sensoren einer Linie folgen kann. Ist es nicht so, dass es über die Linie schwingt?
Wulv
Ik snap niet hoe je met die positie van de sensoren een lijn kan volgen. Zo zwabbert het toch over de lijn?
Stefan
Der set link funktioniert nicht.
Lg
Moritz
Hallo,
die vier Motoren sind im Beitrag oben am Shield an M3 und M4 angeschlossen. Das funktioniert bei uns wunderbar, allerdings ist die Last auf den IC recht hoch. Die Last lässt sich bei zusätzlicher Nutzung von M1 und M2 auf dem Shield verteilen, sprich je einen Motor pro Anschluss. Den Sketch müssen Sie dann erweitern, indem Sie die beiden zusätzlichen Motoren zuerst definieren und anschließend mit motor3.run und motor4.run erweitern.
Frank Raddau
Hallo,
Wie würde der Sketch und die Verschaltung für eine Dauerbelastung aussehen?
Danke im voraus.